





Motores DC sem escovas são usados porque são eficientes, confiáveis e precisam de menos manutenção do que motores com escovas. Eles usam comutação eletrônica em vez de escovas, o que melhora o controle e reduz o desgaste. Seu desempenho depende do projeto do motor, sincronização, retorno, método de controle, eletrônica de acionamento, comportamento velocidade-torque e limites de calor. Este artigo traz informações sobre todos esses pontos.

Fundamentos do Motor DC Brushless
O que é um motor DC sem escovas (BLDC)?
Um Motor DC Brushless (BLDC) é um motor de ímã permanente alimentado por uma fonte DC que funciona usando comutação eletrônica em vez de escovas e um comutador mecânico. Um controlador alterna a corrente através dos enrolamentos do estator em uma sequência planejada para criar um campo magnético rotativo. O rotor contém ímãs permanentes que seguem esse campo rotativo, o que produz rotação. Como não há escovas roçando em um comutador, o desgaste mecânico é reduzido, a manutenção é menor e a eficiência frequentemente é maior. Velocidade e torque são controlados pela forma como o controlador cronometra a comutação e ajusta a tensão e corrente.
BLDC vs DC escovado vs PMSM
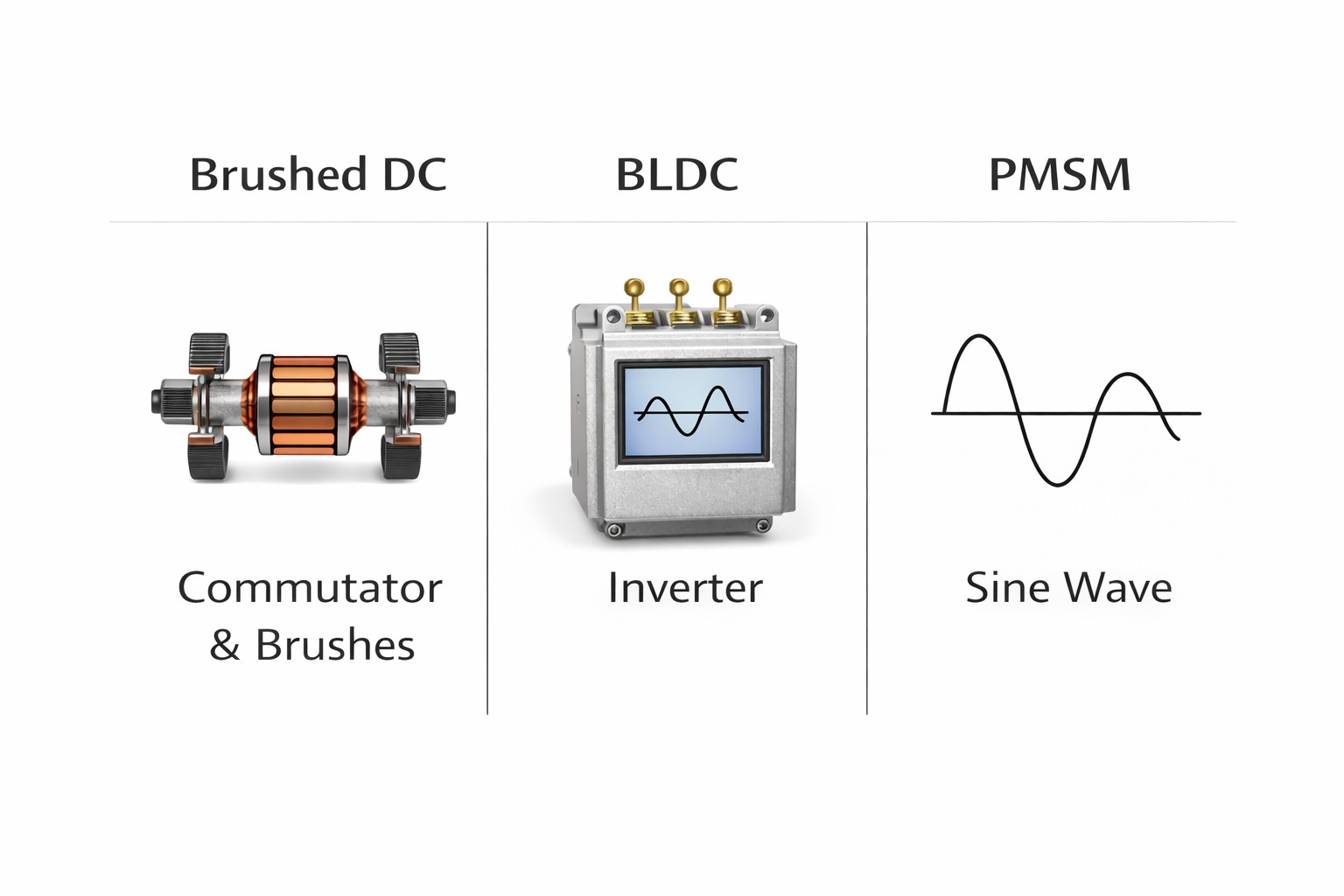
Motores DC com escovas usam escovas e um comutador para alternar a corrente dentro do motor, o que torna o controle simples, mas adiciona peças de desgaste. Motores BLDC removem as escovas e usam um controlador eletrônico para alternar as fases do estator, de modo que a comutação é tratada eletronicamente. Motores PMSM também usam ímãs permanentes e controle eletrônico, então seu hardware pode se assemelhar ao de um motor BLDC. A diferença comum é como a forma de onda de tensão do motor é moldada e como o controlador conduz as fases. Sistemas BLDC são frequentemente associados a formas de onda trapezoidais e comutação baseada em passos, enquanto sistemas PMSM são frequentemente associados a formas de onda sinusoidais e métodos de controle mais suaves.
Comutação Eletrônica e Temporização de Comutação
Funcionamento do Motor DC Brushless Básico
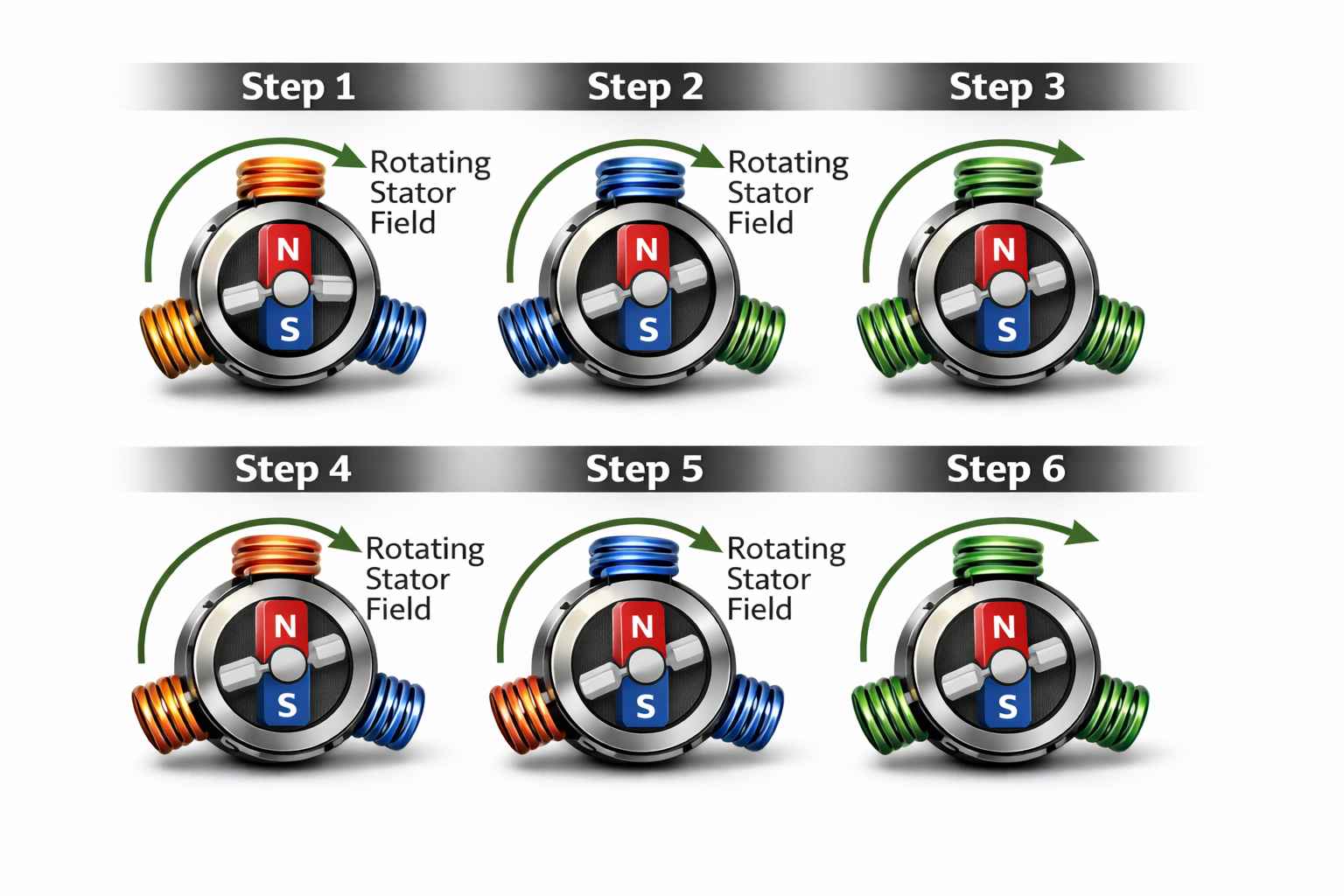
Um motor BLDC gera movimento quando a corrente nos enrolamentos do estator produz um campo magnético que interage com os ímãs permanentes do rotor. O controlador envia corrente para os enrolamentos em ordem repetida, de modo que a parte mais forte do campo magnético do estator continua se movendo ao redor do motor. Esse padrão de mudança age como um campo magnético rotativo. À medida que o campo do estator se move, os ímãs do rotor continuam girando para permanecer alinhados com ele. Essa ação de seguimento constante é o que produz rotação e torque contínuos.
Temporização da Comutação e Seus Efeitos
• Quando a comutação ocorre muito cedo, o campo do estator lidera a posição do rotor e o torque fica mais fraco.
• Quando a comutação ocorre tarde demais, o campo do estator fica atrasado em relação ao rotor e a ondulação de torque aumenta.
• O tempo de comutação adequado melhora a eficiência do torque e reduz ruído e vibrações.
Construção de Motores BLDC e Componentes Centrais
Peças Principais do Motor
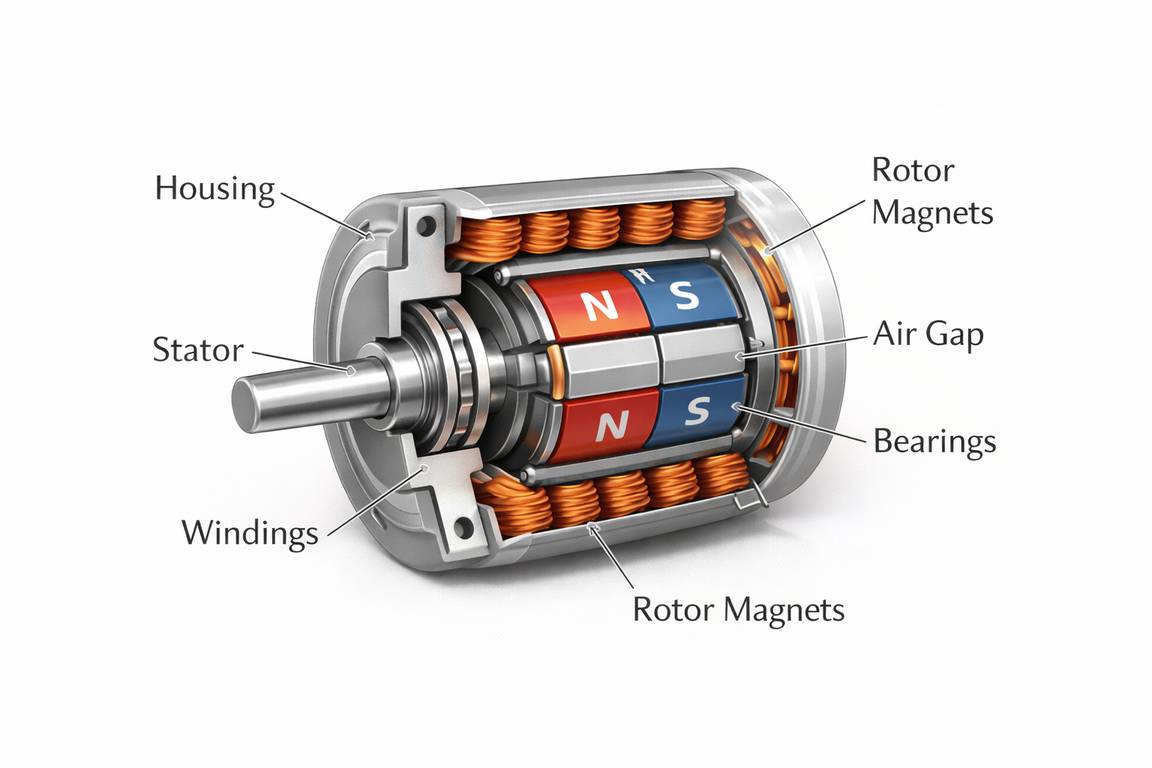
Um motor BLDC consiste em um estator, um rotor com ímãs permanentes, uma folga de ar, rolamentos e uma carcaça. O estator é feito de aço laminado e possui enrolamentos multifásicos que geram o campo magnético rotativo. O rotor contém ímãs permanentes que seguem esse campo rotativo para produzir movimento. O espaço de ar entre o estator e o rotor afeta o acoplamento magnético, a densidade de torque e o funcionamento suave. Os rolamentos sustentam o eixo e influenciam atrito, vibração e vida útil. A carcaça mantém o conjunto alinhado e ajuda a remover o calor do motor.
Fatores de Projeto do Rotor
O projeto do rotor influencia torque, comportamento de velocidade e resistência mecânica. A contagem de polos determina a relação entre comutação elétrica e rotação mecânica; mais postes melhoram o torque em baixas rotações, mas exigem comutação elétrica mais rápida. A posição dos ímãs também afeta o desempenho. Ímãs montados na superfície são comuns e simples, enquanto ímãs internos proporcionam melhor retenção mecânica em velocidades mais altas. O material magnético determina a resistência magnética e a estabilidade da temperatura, influenciando a capacidade de torque e a confiabilidade.
Conexões de Enrolamento: Star (Wye) vs Delta
Os enrolamentos do estator em um motor BLDC são comumente conectados em forma estrela (wye) ou delta.
| Conexão | Efeito prático (típico) | O que ele suporta |
|---|---|---|
| Estrela (Wye) | Torque maior por volt em baixa velocidade | Operação mais forte em baixa velocidade em uma voltagem limitada |
| Delta | Potencial de maior velocidade na mesma tensão | Rotações mais altas quando a demanda de torque é menor |
Detecção de Posição do Rotor e Opções de Realimentação
Por que o acionamento precisa da posição do rotor?
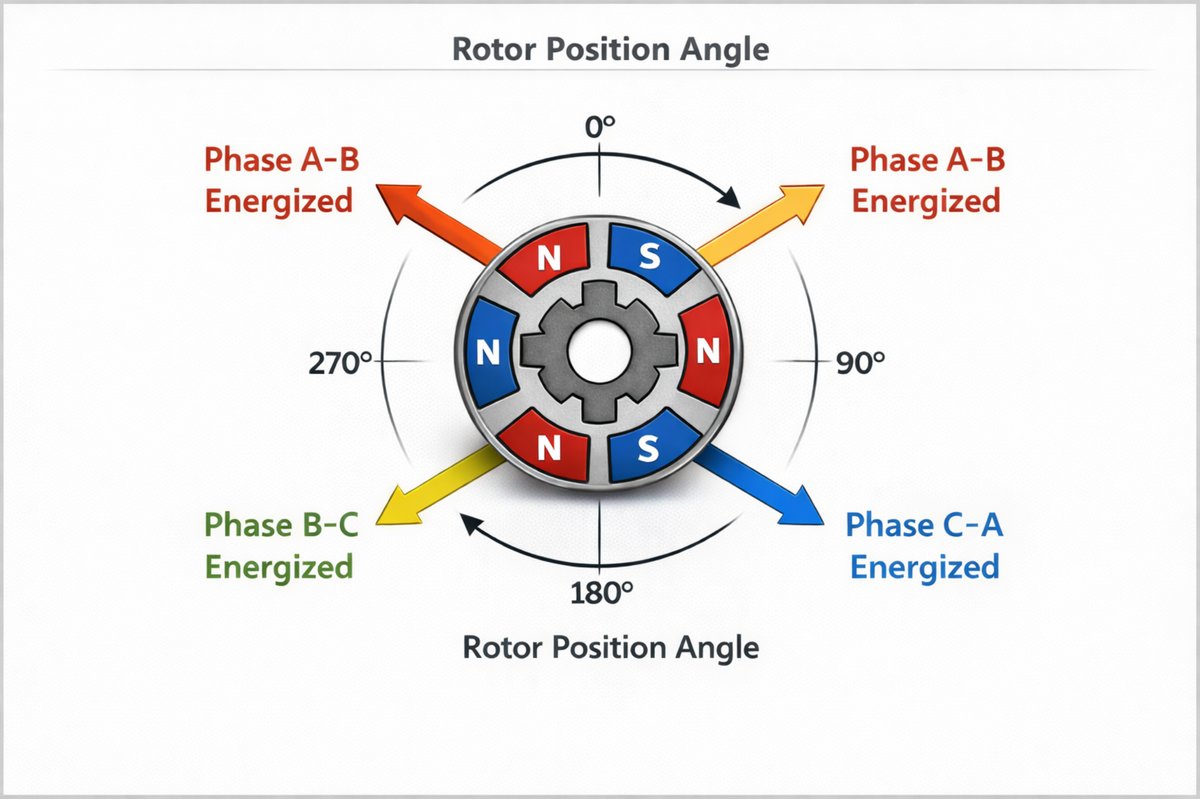
O controlador deve conhecer a posição do rotor (ou estimá-la) para que ele possa energizar as fases corretas no momento correto. Sem informações sobre a posição do rotor, o tempo de comutação deriva, queda de torque e aumentos de aquecimento durante a partida e operação em baixa velocidade.
Sensores Hall vs Codificadores vs BLDC Sem Sensores
• Sensores Hall: acessíveis e confiáveis para comutação básica e forte torque inicial.
• Codificadores/resolvers: usados quando é necessário controle preciso de velocidade/posição.
• Sensorless (baseado em contra-eletroeletromotriz): menos fios/peças, mas mais difíceis em baixa velocidade e inicialização devido à fraca contra-eletroeletrodumática.
Métodos de Comutação e Controle do BLDC
Estilos de Comutação: 6-Passos vs Sinusoidais / FOC
| Método | O que o controlador faz | Resultado |
|---|---|---|
| 6 passos (trapezoidal) | Troca fases em etapas discretas | Simples e robusto; mais ondulações/ruídos possíveis |
| Sinusoidal / FOC | Impulsiona correntes de fase suaves usando controle vetorial | Torque mais suave; frequentemente mais silencioso e eficiente em uma ampla faixa |
Quando o 6-Step Faz Sentido vs Quando o FOC É Melhor
Ambos os métodos funcionam bem, mas são escolhidos para objetivos diferentes.
• O 6-step é frequentemente escolhido quando simplicidade, custo e robustez importam.
• O FOC é escolhido quando torque suave, baixo ruído e controle preciso importam em uma ampla faixa de velocidades.
Eletrônica do Sistema de Acionamento BLDC
Ponte Inversora Trifásica
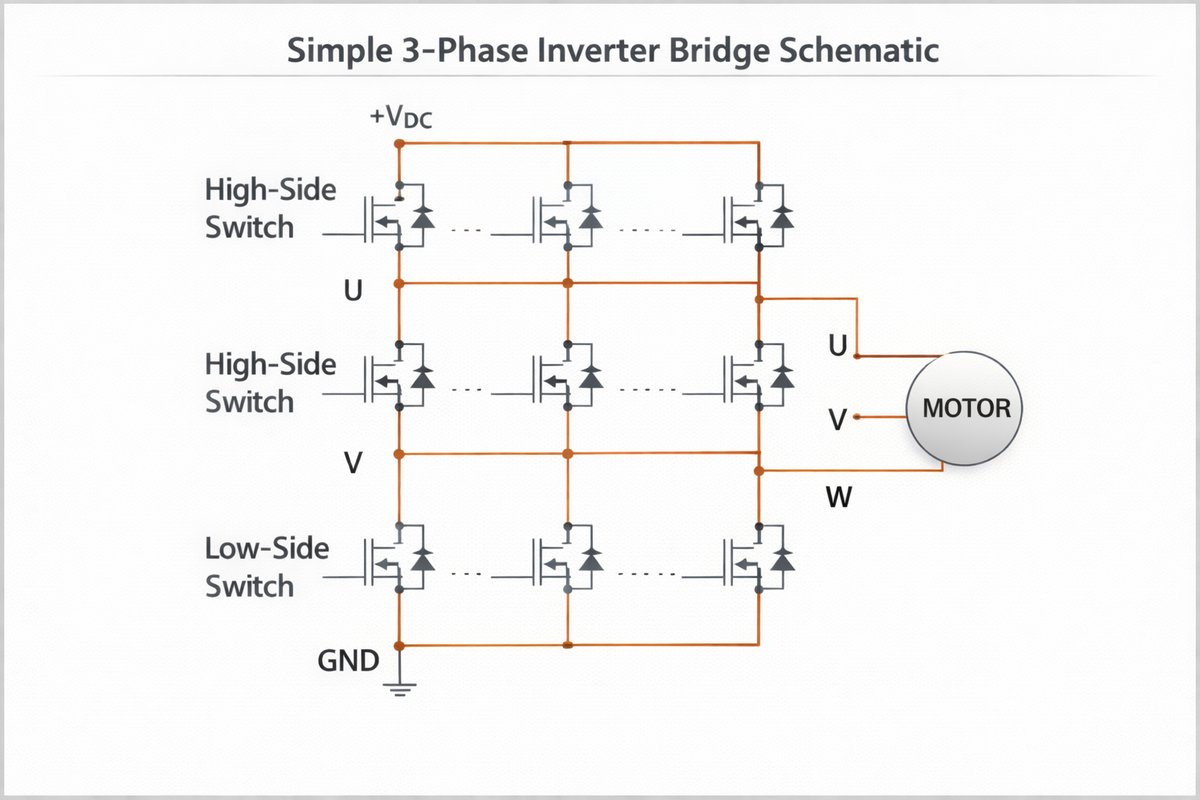
Um motor BLDC precisa de um acionamento eletrônico para realizar a comutação. O estágio de potência é um inversor trifásico composto por seis interruptores. Ao comutar esses dispositivos na sequência correta, o acionamento direciona a energia DC para as fases do motor e produz um campo rotativo do estator.
Papéis de Controlador
• Interruptores de energia: MOSFETs em várias faixas de tensão BLDC.
• Driver de portão + proteções: comutação segura, controle de tempo morto e manejo de falhas.
• Lógica de controle (MCU/DSP): temporização de comutação, controle de PWM, leitura de sensores e gerenciamento de limites.
Velocidade, Torque e Freios em Motores DC Brushless
Controle de Velocidade e Torque: PWM e Limites de Corrente
Controle de velocidade: O ciclo de trabalho do PWM altera a tensão DC efetiva do motor, o que altera sua velocidade.
Loop de velocidade: O controlador compara a velocidade alvo com a velocidade medida ou estimada e corrige a saída caso haja algum erro.
Torque e corrente: O torque do motor está intimamente relacionado à corrente de fase, então limitar a corrente também limita o torque.
Limitação de corrente: O drive monitora a corrente e reduz a PWM quando necessário para evitar danos durante as partidas, paradas e mudanças repentinas de carga.
Inversão de Direção e Fundamentos de Frenagem/Regeneração
• Inversão de direção: O motor pode funcionar na direção oposta invertendo a ordem de comutação, o que altera a sequência de fases.
• Freia: O acionamento pode aplicar torque oposto à direção do movimento para desacelerar o rotor de forma controlada.
• Regeneração: Ao frear nas condições adequadas, o motor pode atuar como gerador e enviar energia de volta para o barramento DC.
Controle de direção, frenagem e regeneração vêm de como o acionamento alterna as fases do motor e gerencia a corrente. Ao alterar a sequência de comutação e controlar o torque, o mesmo motor BLDC pode funcionar para frente ou para trás, desacelerar suavemente e, em alguns sistemas, devolver parte de sua energia à fonte.
Desempenho e limites dos motores DC sem escovas
Como se comportam velocidade e torque em um motor BLDC?
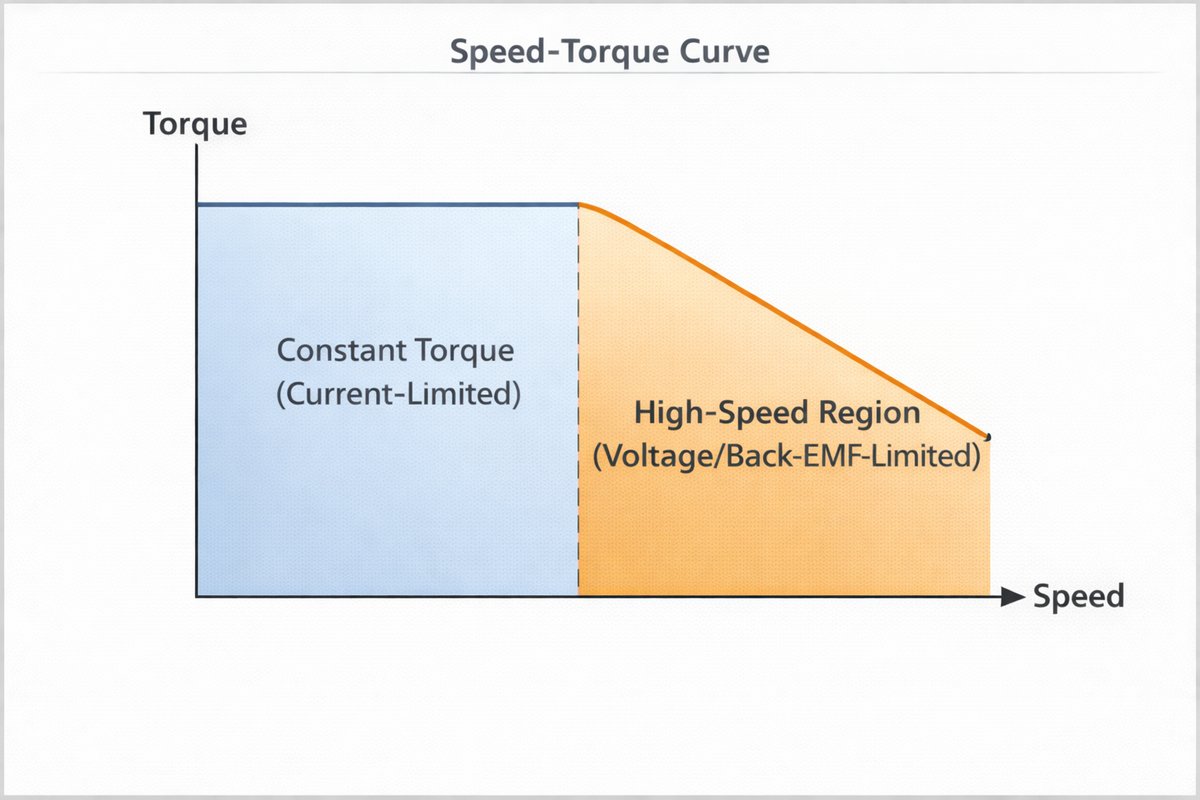
Um motor DC sem escovas não fornece o mesmo torque em todas as velocidades. Em baixa velocidade, o torque é limitado pela capacidade de corrente do acionamento. Em velocidades mais altas, o motor atinge um ponto em que a tensão do barramento DC e a contra-EMF limitam o torque que o acionamento pode produzir. Em uma curva velocidade–torque, isso se manifesta como uma região plana de torque quase constante em velocidades mais baixas e uma região de torque em baixas velocidades.
Quais fatores determinam a velocidade máxima de um motor BLDC?
• Tensão no barramento DC: Uma tensão maior no barramento DC oferece mais margem de tensão para superar a contra-eletroeletromação em alta velocidade.
• Contra-EMF (Ke/Kv): A contra-eletroeletromina aumenta com a velocidade e reduz a tensão que o acionamento pode usar para empurrar corrente para os enrolamentos.
• Método de controle: Diferentes métodos de controle afetam o quão bem o trânsito mantém o torque conforme a velocidade aumenta.
• Térmica: As perdas nos enrolamentos e na eletrônica aumentam com a velocidade e a carga, limitando quanto tempo o motor pode funcionar em alta velocidade.
Especificações que mais importam para motores DC brushless
| Termo especulativo (catálogo) | O que isso te diz | Por que isso importa |
|---|---|---|
| Faixa nominal de tensão / barramento DC | Faixa de tensão de alimentação normal | Define a faixa de velocidade possível e ajuda a escolher o drive certo |
| Corrente nominal/corrente contínua | Corrente segura para uso prolongado | Mostra quanto aquecimento ocorrerá em uma determinada carga |
| Potência nominal (W) | Potência de saída em determinado ponto | Ajuda a comparar a força de diferentes motores |
| Torque nominal/torque máximo | Quanta força de rotação o motor pode gerar | Mostra como ele lida com largadas e sobrecargas curtas |
| Velocidade (RPM) | Faixa normal de velocidade de operação | Ajuda a ajustar o motor às engrenagens e à carga |
| Constantes Kv / Ke e Kt | Velocidade, voltagem e torque dos links | Conecta tensão e corrente ao desempenho real do motor |
| Eficiência | Quanta potência de entrada se torna potência mecânica | Afeta aquecimento, duração da bateria e custos de operação |
Eficiência, Perdas e Calor em Motores DC Brushless
Fontes de perda em um motor DC sem escovas
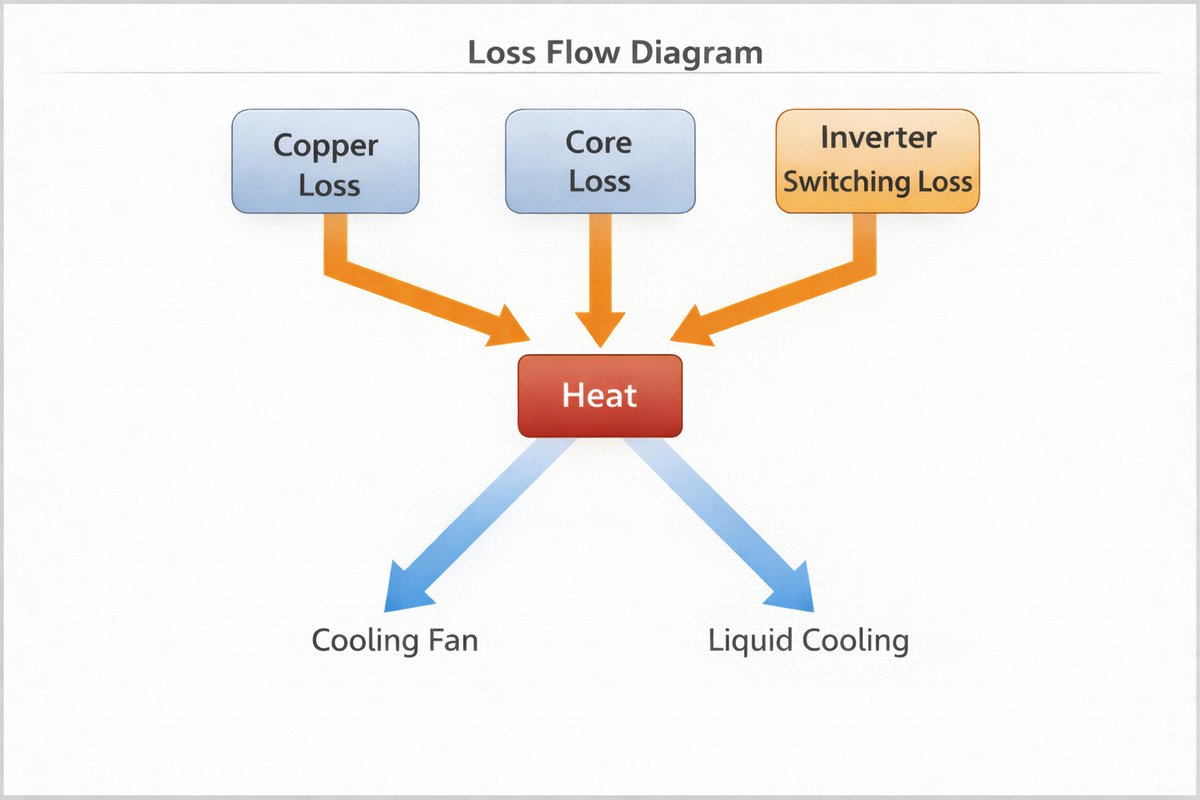
Em um sistema de motor DC sem escovas, nem toda a potência de entrada é convertida em saída mecânica útil. Parte disso se transforma em calor dentro do motor e do motor. A maior parte desse calor vem da perda de cobre, perda de núcleo e perda de comutação, e essas perdas aumentam à medida que a corrente e a velocidade aumentam.
• Perda de cobre (I²R): A perda de cobre ocorre nos enrolamentos do estator e aumenta com a corrente. Torque mais alto exige maior corrente, então a perda de cobre aumenta conforme a demanda de torque aumenta.
• Perda de núcleo ou ferro: A perda de núcleo está ligada à variação do campo magnético no estator. Ela aumenta com a frequência elétrica e o nível de fluxo, tornando-se mais necessária em velocidades mais altas.
• Perda de comutação: A perda de comutação ocorre nos eletrônicos de potência que acionam o motor. Depende da frequência do PWM, do tipo de dispositivos de comutação e da corrente que flui durante cada evento de comutação.
Resfriamento e proteção térmica em sistemas BLDC
O controle térmico é necessário para manter tanto o motor quanto o inversor dentro dos limites de operação seguros. O calor deve ser removido por um caminho de montagem termicamente condutor e fluxo de ar adequado, enquanto os limites de corrente devem ser definidos de forma conservadora quando o resfriamento é restringido ou se esperam longos períodos de operação. A detecção de temperatura e o recuo térmico podem proteger ainda mais o sistema ao reduzir a corrente quando as temperaturas se tornam excessivas, melhorando a confiabilidade e a vida útil.
Aplicações de Motores DC Brushless
Aplicações comuns de motores DC sem escovas
• Ventiladores e sopradores para ar em movimento
• Bombas para movimentação de líquidos
• Ferramentas elétricas e pequenas máquinas
• Automação e sistemas de movimento
• Juntas e atuadores robóticos
• Veículos e dispositivos movidos a bateria
Conclusão
Motores DC sem escovas funcionam combinando ímãs permanentes com controle eletrônico para produzir um movimento suave e eficiente. Seu desempenho real depende do tempo correto de comutação, realimentação da posição do rotor, método de controle, operação do inversor, resfriamento e adequado ajuste motor-acionamento. Velocidade, torque, eficiência e confiabilidade são todos afetados por esses fatores. Compreendê-los ajuda a explicar como os sistemas BLDC funcionam, seus limites e o que afeta o desempenho a longo prazo.
Perguntas Frequentes [FAQ]
Como um motor BLDC sem sensor começa parado?
Começa forçando o rotor para uma posição conhecida, depois fazendo o motor funcionar em circuito aberto. Quando o motor atinge velocidade suficiente para a detecção de contra-eletromogem, o controlador passa para operação normal sem sensores.
O que causa ruído e vibração em um motor BLDC?
Ruído e vibração são causados por desequilíbrio do rotor, desalinhamento, rolamentos desgastados, torque de pinagem, folgas de ar desiguais e comutação PWM.
Como a inércia de carga afeta um motor BLDC?
Alta inércia de carga faz com que o motor acelere e desacelere mais lentamente. Também aumenta a demanda de torque e pode aumentar a corrente durante mudanças rápidas de velocidade.
Quais pontos de fonte de alimentação e fiação importam em um sistema BLDC?
A fonte de alimentação deve suportar a corrente de pico sem queda de tensão. Capacitores devem suavizar os picos de comutação, e a fiação deve ser adequadamente dimensionada, curta e bem aterrada para reduzir o ruído.
Quais funções de proteção são usadas em drives BLDC?
Drives BLDC utilizam proteção contra sobrecorrente, sobretensão, subtensão, curto-circuito, parada e superaquecimento para evitar danos.
Como as condições ambientais afetam um motor BLDC?
Poeira, umidade, calor, vibrações e condições corrosivas podem reduzir o desempenho, danificar peças e encurtar a vida útil do motor.









